Des scientifiques sud-coréens ont construit des micro-robots travaillant en groupe, directement inspirés des fourmis. Ils leur ont fait réaliser plusieurs tâches complexes.
Des scientifiques sud-coréens ont développé des microrobots magnétiques cuboïdes travaillant en essaims, comme des fourmis. Ils peuvent saisir et transporter des objets plusieurs fois plus grands. Les résultats ont été publiés le 18 décembre 2024 dans la revue Presse cellulaire Appareil.
Les chercheurs, explique un communiqué, s’inspirent de plus en plus de la façon dont les fourmis travaillent collectivement pour atteindre leurs objectifs, par exemple pour combler une brèche sur un chemin ou se regrouper sur un radeau pour survivre aux inondations. Ils ont également remarqué que, comme les fourmis, ils sont confrontés à moins d’échecs lorsqu’ils travaillent en groupe. “Même si certains membres du groupe n’atteignent pas l’objectif, les autres continuent d’exécuter leurs mouvements programmés jusqu’à ce qu’un nombre suffisant d’entre eux y parviennent.”allumé.
Tâches complexes à réaliser
L’auteur Jeong Jae Wie du Département d’ingénierie organique et nano de l’Université Hanyang de Séoul et ses collègues ont testé différentes configurations du groupe de micro-robots pour effectuer une tâche.
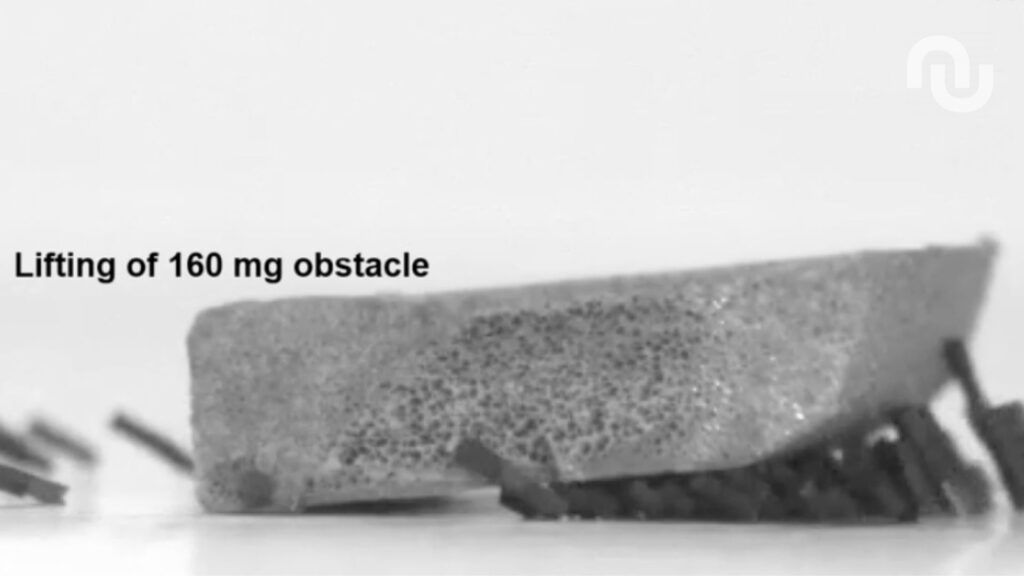
Associés de manière différente à chaque tâche vécue, les robots ont réalisé avec succès plusieurs exercices compliqués. Ils ont ainsi pu :
- grimper sur un objet 5 fois plus haut que sa propre hauteur,
- jette-toi par-dessus un obstacle,
- transporter des marchandises pesant 350 fois leur poids individuel,
- guider les mouvements des petits organismes.
Un groupe de 1 000 micro-robots a même réussi à enrober une pilule 2 000 fois le poids d’un robot individuel, puis à former un radeau flottant sur l’eau pour la transporter au-dessus du liquide. Finalement, un dernier groupe réussit à déboucher un tube.
Quelles futures applications pour les micro-robots ?
De tels assemblages permettront à l’avenir de développer des technologies permettant de réaliser des tâches plus complexes dans des environnements plus contraignants. Des tâches dans des environnements aujourd’hui trop difficiles à réaliser pour un robot seul. Il s’agirait par exemple de débloquer une artère.
Jeong Jae Wie conclut : “Bien que les résultats de l’étude soient prometteurs, les essaims de micro-robots Les appareils magnétiques auront besoin de niveaux d’autonomie plus élevés avant d’être prêts pour des applications réelles. Ils nécessitaient un contrôle magnétique externe et sont incapables de se déplacer de manière autonome dans des espaces complexes ou confinés comme de véritables artères. Les recherches futures porteront sur l’amélioration de leur niveau d’autonomie, comme le contrôle en temps réel de leurs mouvements et trajectoires. »
Comprendre la matière et l’Univers avec la physique



